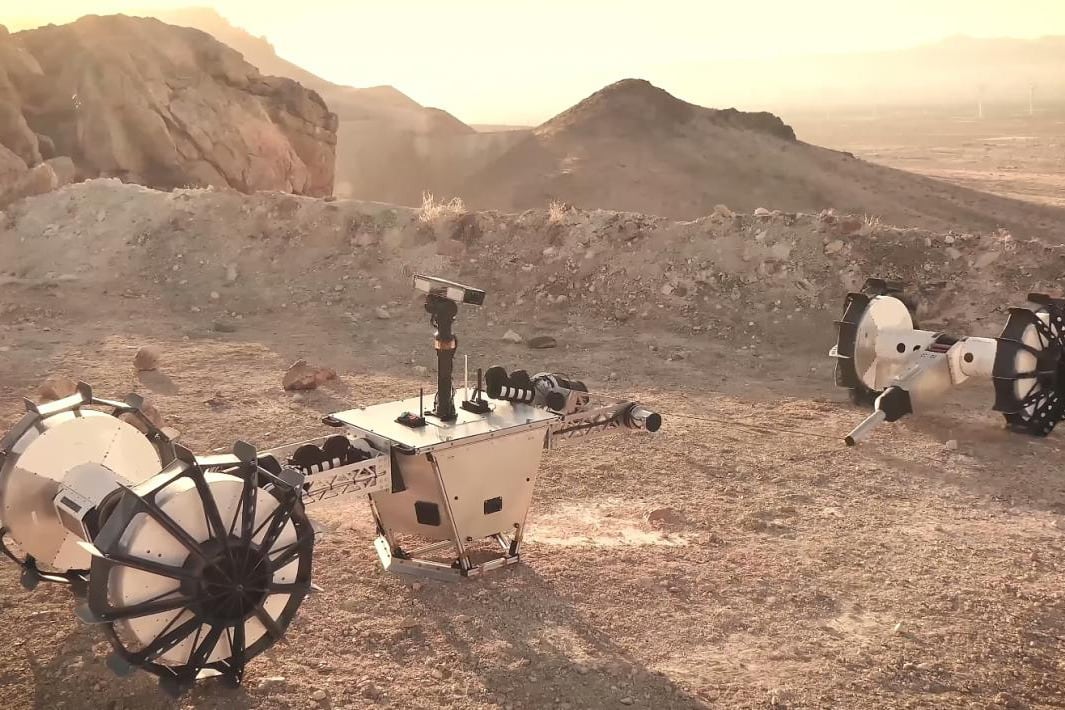
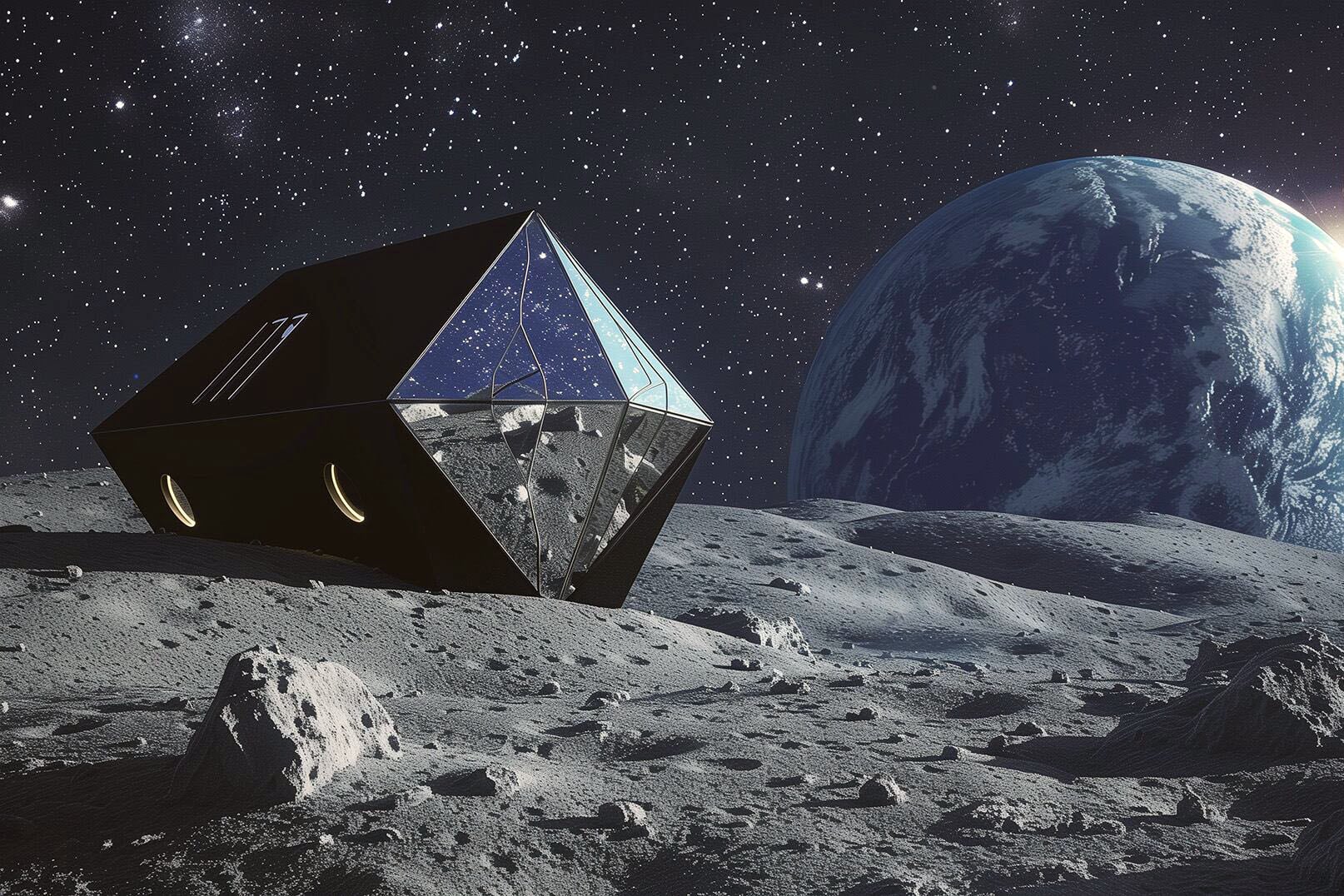
Fue pensado para poder descender por los cráteres y acantilados casi verticales de la Luna y Marte
La NASA diseña un vehículo de exploración capaz de moverse en desniveles
La NASA diseñó un rover, un nuevo vehículo explorador de otros planetas, capaz de descender por los costados de los cráteres y acantilados casi verticales en la Luna y Marte y otros plane

- X

- Bluesky




- Telegram